First Official Stable Version of Tangible Landscape Software Released
This month, developers at the Center for Geospatial Analytics announced the first stable release of Tangible Landscape, the center’s signature open source system for hands-on geospatial modeling.
The new release (v1.0.0) represents a fully documented and stable version of the code, allowing other developers to reliably use the interface and API to set up their own Tangible Landscape system and create custom activities in GRASS GIS.
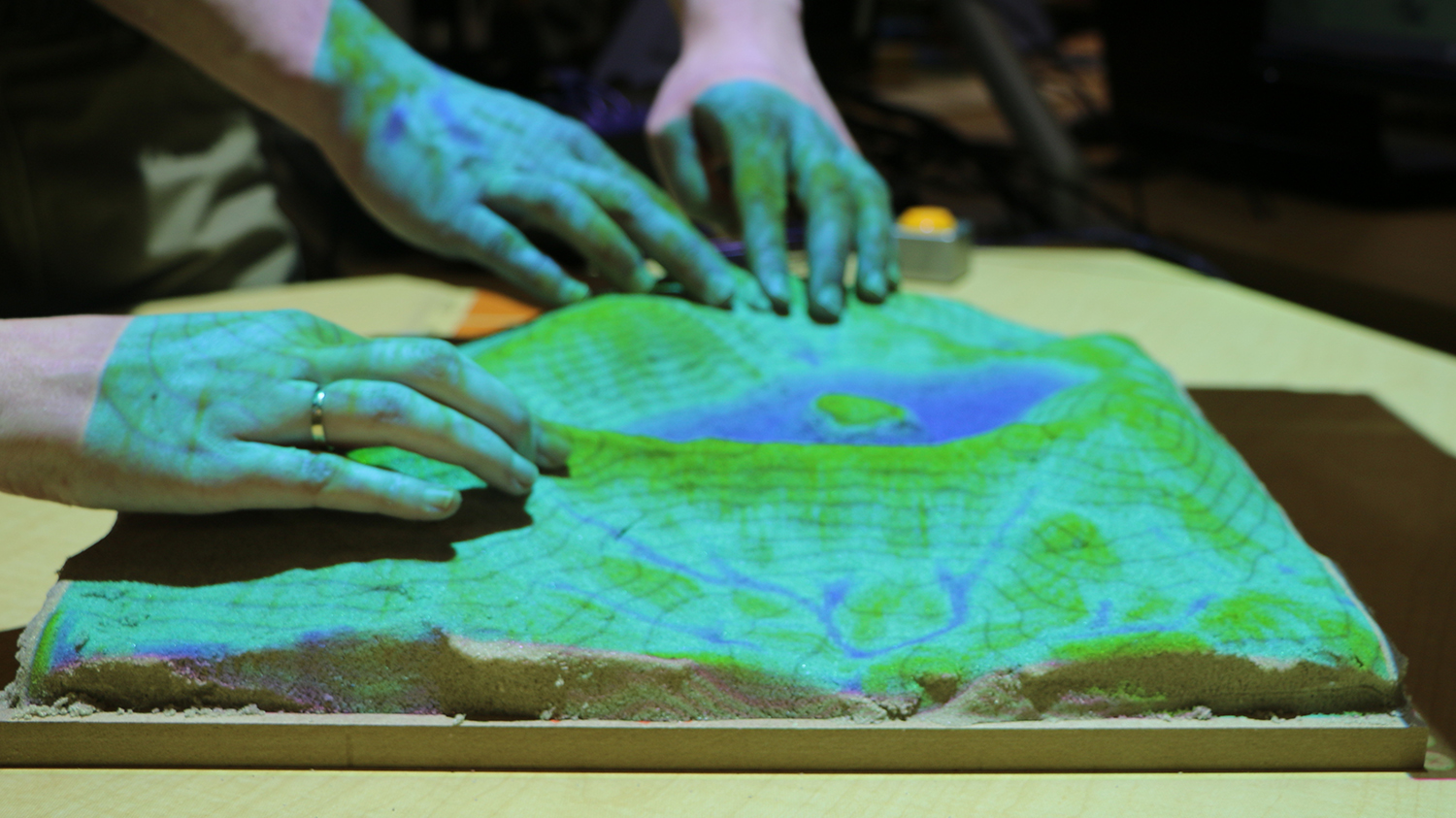
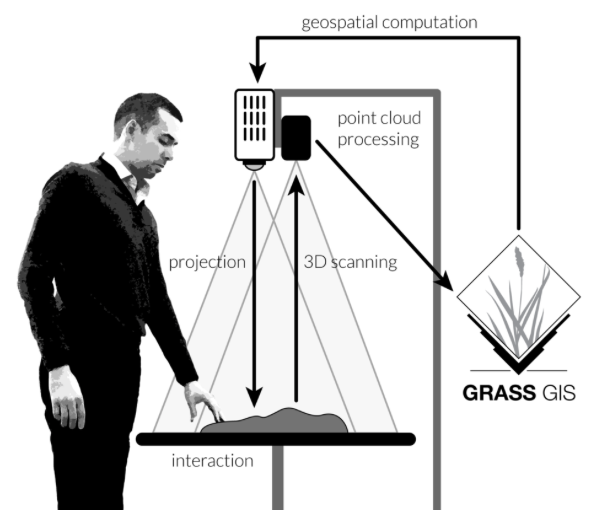
Tangible Landscape couples a physical model of a landscape with a geographic information system (GIS) and permits people of all skill levels to explore and control complex geospatial models––by reshaping an interactive surface and using intuitive motions interact with a simulation. The system is powered by GRASS GIS and operates through a continuous cycle of 3-D scanning, geospatial computation and projection back onto the physical model.
Because Tangible Landscape code has always been freely available, research and education groups around the world “have been able to build Tangible Landscape on their own before,” explain Anna Petrasova and Vaclav Petras, software engineers at the Center for Geospatial Analytics, “but now with the updated documentation, it should be more straightforward. Now they should be able to add new analyses with some basic Python and GRASS GIS knowledge.”
In 2018, center researchers published the second edition of Tangible Modeling with Open Source GIS, which details the theory and geospatial concepts underlying Tangible Landscape. The new release documentation complements the book by delving into guidance for setup and specific uses. “For example,” says Petras, “the book covers the theory of viewshed modeling while the documentation describes the Python API and JSON configuration for developing a custom viewshed application.”
GRASS GIS and the Tangible Landscape code are free and open source; the cost of setting up a Tangible Landscape system depends only on choice of hardware. The new release documentation details recommendations for key commercial components, as well as includes step-by-step instructions for setup and tutorials. Personnel at the Center for Geospatial Analytics also are available to provide initial support for system setup; contact the Service Center for details.